Схемы любительских частотных преобразователей
 Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
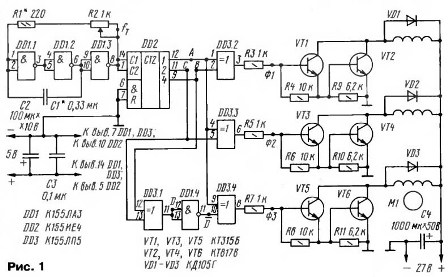
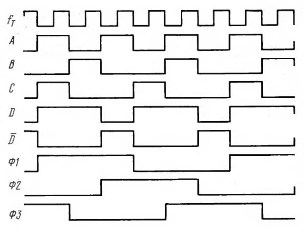
Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
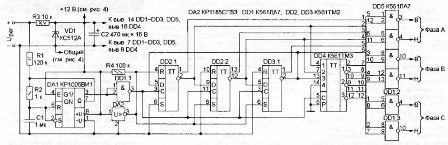
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
 Читайте также:
Читайте также:

Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
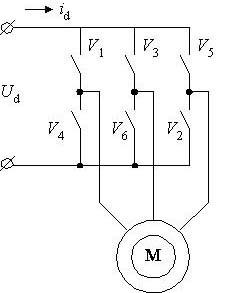
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
-
Читайте также:

Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
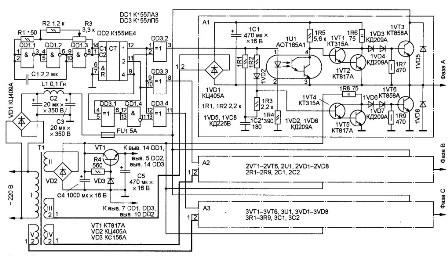
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
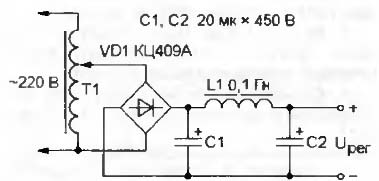
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
-
Читайте также:

В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
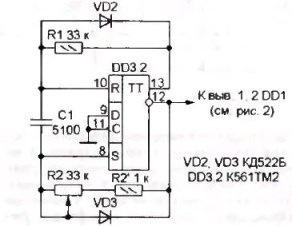
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
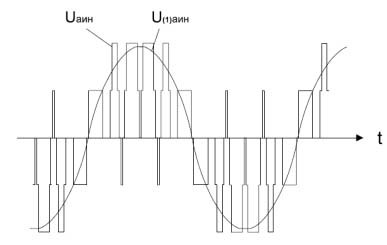
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
-
Читайте также:

При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
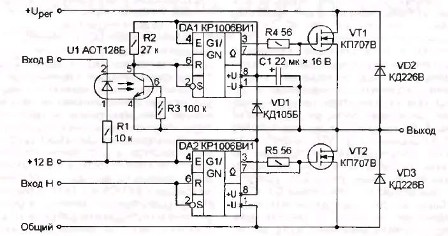
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
Надеюсь, что эта статья была для вас полезной. Смотрите также другие статьи в категории Электрическая энергия в быту и на производстве » Практическая электроника
Подписывайтесь на канал в Telegram про электронику для профессионалов и любителей: Практическая электроника на каждый день
Частотный преобразователь своими руками
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем. На этот случай вполне можно обойтись самостоятельным изготовлением частотника, что позволит использовать устройство с минимальными потерями мощности.
Существует много схем, которые дают возможность запустить трехфазный двигатель. Но, часть из них не предусматривает плавного включения или выключения, или же создают дополнительные неудобства, которые не дадут использовать двигатель полноценно. Исходя из этого, и были изобретены частотные преобразователи. Они позволяют полностью контролировать работу двигателя, при экономичном расходе электроэнергии и безопасности эксплуатации.
Рис. 1. Схема запуска трехфазного двигателя
Составляющие частотного преобразователя
Для наглядности, схему можно разбить на три составляющих или три взаимосвязанных блока:
2. Фильтр, предназначение которого есть сглаживание напряжения на выходе.
3. Инвертор, который собственно и отвечает за производство необходимой частоты.
Его использование дает значительное уменьшение пускового тока, при включении оборудования, что существенно продлевает эксплуатационный срок двигателя и устройства, где данный двигатель используется. Естественно, что избавившись таким образом от высоких показаний пускового тока, удается и сэкономить электроэнергию, которая уходила ранее при запуске оборудования. А это особенно актуально в условиях, где предусмотрены частые запуски и остановки устройств.
Рис. 2. Составляющие частотного преобразователя
Современные покупные инверторы широко используются в таких сферах, как производство, водоснабжение, энергетика, сельское и городское хозяйства, в электронике, и в автоматических линиях и комплексах.
Стоимость фирменного частотного преобразователя слишком высока, для того, чтобы изучить его процессы работы или использовать в быту или домашней мастерской. Поэтому часто используются в таких ситуациях самодельные частотники.
Стоит обратить внимание на то, что в домашних условиях крайне не рекомендуется использование двигателей, рассчитанных на мощность большую, чем 1 кВт. Таковы особенности домашней сети.
Имея необходимый двигатель, потребуется для начала соединить его обмотки между собой способом “треугольник”.
Рис. 3. Трёхфазный двигатель
Рис. 4. Соединение треугольник
Рис. 5. Соединение треугольник
Схема самого частотного преобразователя.
Рис. 6. Схема частотного преобразователя
Питание осуществляется от блока питания 27 Вольт постоянного напряжения. Это может быть, как регулируемый БП, так и сделанный собственноручно, рассчитанный на данное напряжение. Схема подключения двигателя;
Рис. 7. Схема подключения двигателя
Рис. 8. Схема подключения двигателя
На данный момент это самая обсуждаемая схема частотного преобразователя, который можно сделать собственноручно. Прошивки микроконтроллера изобилуют на тематических форумах. Потребуется не только умение грамотно паять, но и прошивать микроконтроллеры.
Рис. 9. Печатная плата
Потребуется надежный источник питания на 24 Вольта. Предлагается его также изготовить собственноручно по схеме.
Рис. 10. Схема источника питания
Естественно, что устройство можно приобрести и готовым. Они бывают фирменными или сделанными народными мастерами, которые обладают положительными рекомендациями.
Мнения читателей
- Dimzon / 26.09.2019 — 04:50
Отсюда — https://radiokot.ru/circuit/digital/security/31/ — тут же и прошивка для PIC, и ссылка на форум с поддержкой разработчика.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Частотный привод 5-200 Гц (10-400 Гц)
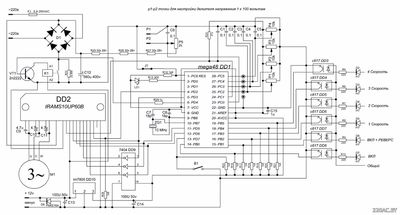
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две “заводских” настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
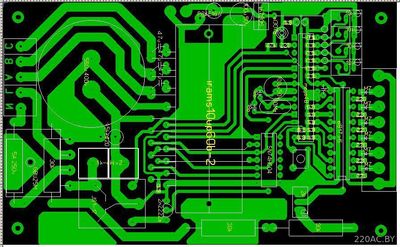
Проект в layout
Ниже фото того, что у меня получилось
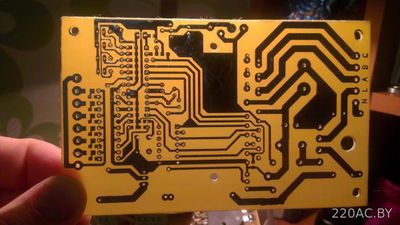
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
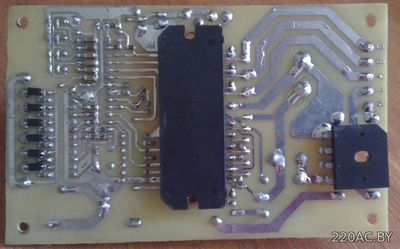
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 “штырь”. на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет “заводские ” настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить “заводские ” настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
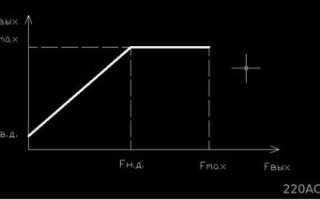
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
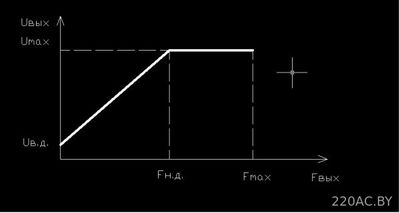
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
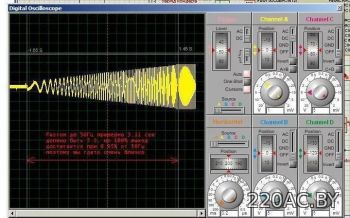
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет “хана”. Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Как сделать частотный преобразователь своими силами: принцип работы, сборка по схеме, обслуживание
Электродвигатель
Впервые мир познакомился с таким устройством, как трехфазный асинхронный электродвигатель, еще в конце 19 столетия. И начиная с того времени, его стали применять на каждом промышленном предприятии, где он стал обязательным элементом. Во время эксплуатации электродвигателя важно обеспечить его плавный пуск и остановку. Это можно сделать только при наличии специального устройства – преобразователя частоты.
В первую очередь, целесообразно оснащать преобразователем крупные электродвигатели, обладающие высокими показателями мощности. Польза от наличия такого устройства заключается в возможности менять пусковые токи, задавая необходимую их величину.
Принцип работы частотного преобразователя
Конечно, можно регулировать пусковой ток и вручную, однако в этом случае будет тратиться определенное количество энергии впустую, что негативным образом скажется на эксплуатационном ресурсе электродвигателя. Наблюдаемый в устройствах, не имеющих подобного приспособления, ток имеет величину, превышающую в 5-7 раз номинальное напряжение. В таких условиях невозможно создать нормальные условия для работы оборудования.
Действие такого устройства, как преобразователь частоты, основывается на использовании электронного механизма, который контролирует работу двигателя. Но его возможности не ограничиваются лишь мягким пуском. При помощи преобразователя частоты можно осуществлять плавную настройку работы привода, выбирая оптимальный показатель между напряжением и частотой, который рассчитывается строго по заданной формуле.
Среди достоинств такого устройства главным следует назвать то, что оно помогает уменьшить расход электроэнергии в среднем на 50%. К тому же частотный преобразователь позволяет выставлять такой режим работы, который будет в максимальной степени учитывать потребности определённого производства.
Действие подобного преобразователя основывается на принципе двойного преобразования напряжения.
- На начальном этапе выполняется регулировка напряжения сети путем его выпрямления и фильтрования, что достигается посредством использования системы конденсаторов.
- Далее настает черед электронного управления, благодаря которому для тока выставляется частота, соответствующая заранее выбранному режиму.
В результате возникают прямоугольные импульсы, которые корректируются обмоткой статора двигателя, что позволяет вывести ее на уровень синусоиды.
На что обратить внимание при выборе?
Если обратить внимание на доступные сегодня модели преобразователей, то определяющим фактором становится именно цена частотника . Дело в том, что наибольшим функционалом обладают лишь дорогие модели пребразователей частоты. Однако, чтобы выбираемый преобразователь смог успешно справляться с необходимыми задачами, нужно исходить из конкретных условий его использования.
- Преобразователь частоты может предусматривать два типа управления: векторное и скалярное. В первом случае можно выставить с высокой точностью необходимую величину тока. Особенностью скалярного управления является то, что устройство работает лишь в одном заданном соотношении между частотой и напряжением на выходе. Такие устройства могут использоваться лишь для обычных бытовых устройств, наподобие вентилятора.
- Характеристики мощности во многом влияют на универсальность преобразователя частоты. Это не только расширяет его возможности, но и создает меньше проблем при обслуживании.
- Для работы устройства должна быть предусмотрено сеть, обладающая максимально широким диапазоном напряжения. В этом случае уменьшается опасность, что устройство выйдет из строя в случае резких скачков. Наибольшую угрозу для оборудования представляет повышение напряжения, что может привести к взрыву сетевых конденсаторов.
- Важным параметром является и частота, значение которой должно быть достаточным для удовлетворения потребностей производства. По его нижнему пределу можно понять, насколько широкие возможности имеются для выбора оптимальной скорости привода. Если имеется необходимость в устройстве, обладающем более широким диапазоном частоты, то следует обратить внимание на модели с векторным управлением. На практике же наиболее распространены частоты с диапазоном 10-60 Гц, в редких случаях используются до 100 Гц.
- Наличие различных входов и выходов, используемых для управления. Гораздо удобнее пользоваться устройством, у которого количество подобных разъемов достаточно велико. Однако это же приводит к увеличению стоимости оборудования, а также создает трудности с правильной настройкой. В устройствах подобного типа могут быть предусмотрены три типа разъемов: дискретные, цифровые, аналоговые. Основное назначение первых заключается во вводе команд управления и вывода сообщений о событиях. При помощи цифровых разъёмов осуществляется ввод сигналов цифровых датчиков. Аналоговые же разъемы призваны решать задачу по вводу сигналов обратной связи.
- При выборе модели преобразователя следует обращать внимание на шину управления, характеристики которой должны соответствовать возможностям схемы частотного преобразователя, что проявляется в соответствующем количестве разъемов. Оптимальный вариант, когда их имеется достаточное количество на случай возможной модернизации.
- Перегрузочные способности. Рекомендуется отдавать предпочтение моделям частотников, запас мощности которых на 15% превосходит мощность используемого двигателя. Во избежание ошибок не помешает перед принятием решения ознакомиться с документацией. В них обычно приводятся все основные характеристики двигателя. Если стоит задача подобрать частотник, способное выдерживать пиковые нагрузки, то рекомендуется отдавать предпочтение оборудованию, которое сможет сохранять значение тока в условиях пиковой работы на 10% больше указанного.
Материалы
Чтобы сделать своими руками частотный преобразователь для однофазного электродвигателя, необходимо подготовить следующее:
- IR2135(IR2133) – драйвер трёхфазного моста;
- AT90SPWM3B – микроконтроллёр (используется как генератор PWM);
- программатор (например, AVReAl);
- шесть штук транзисторов IRG4BC30W;
- ЖКИ индикатор;
- шесть кнопок.
Самостоятельная сборка преобразователя частоты
Не стоит отказываться от идеи сделать своими силами преобразователь. Эту задачу решить по силам любому владельцу, учитывая, что в сети можно найти большое количество инструкций и схем по сборке подобного устройства и его подключению к асинхронному двигателю.
Рассматривая такой вариант, главное, о чем следует помнить – собираемая своими руками модель должна отличаться не только доступной ценой, но и надежностью, а также быть способна успешно решать задачи в бытовых условиях. Если же имеется потребность в устройстве для промышленного использования, то, естественно, оптимальным выбором будут преобразователи, предлагаемые магазинами.
Порядок действий по сборке схемы частотного преобразователя
Приводимая ниже схема рассчитана на проводку с напряжением 220В и одной фазой. Устройство предназначено для двигателя, мощность которого не превышает 1 кВт.
Вначале необходимо соединить между собой обмотки двигателя, для чего используется вариант «треугольник».
Основу конструкции оборудования образуют две платы. Первая будет уступать место для размещения таких элементов, как блок питания и драйвер. Помимо них здесь будут установлены транзисторы и силовые клеммы. Вторая плата используется для крепления микроконтроллера и индикатора. Для соединения плат друг с другом используется гибкий шлейф.
Для изготовления импульсного блока питания используется обычная схема, которую можно найти в сети.
Чтобы контролировать работу двигателя, нет необходимости воздействовать на ток при помощи внешних устройств. Однако нелишним будет добавить в конструкцию микросхему(IL300) путем введения линейной развязки.
Общий радиатор используется для размещения не только транзисторов, но и диодного моста.
Обязательным является наличие оптронов ОС2-4, назначение которых заключается в дублировании кнопок управления. На ОС-1 возлагается задача по выполнению пользовательских функций.
Если выбираемый частотный преобразователь имеет одну фазу, то он может работать без трансформатора. Альтернативой ему может служить токовый шунт, который выполняется в виде четырех витков манганинового провода сечением 0,5 км на оправе 3мм. Используемый шунт можно дополнить и усилителем DA-1.
Если мощность двигателя составляет 400 Вт, то он может работать и без термодатчика. С задачей по измерению напряжения сети успешно может справиться и DA-1-2 (усилитель).
Следует позаботиться о защите кнопок, установив на них пластиковые толкатели, управление же осуществляется посредством опторазвязки.
Если будут присутствовать длинные провода, то к ним следует добавить помехоподавляющие кольца.
Во время работы ротора двигателя можно выбирать любую скорость пределах частоты 1: 40. В режиме работы малых частот следует задействовать режим фиксированного напряжения.
Подключение частотного преобразователя
Если используемая проводка имеет одну фазу и напряжение 220В, то в качестве предпочтительной схемы подключения используется вариант «треугольник». Важно помнить о том, что ток на выходе может быть больше номинального не более, чем на 50%.
Если речь идет о трехфазной проводке с напряжением 380В, то для подключения к двигателю частотного преобразователя выбирается схема «звезда». Для простоты выполнения этой процедуры на преобразователе присутствуют клеммы, на поверхности которых имеются подсказки в виде букв.
- R, S, T– к этим контактам подводят провода сети в любом порядке;
- U , V , W – при помощи их выполняется включение асинхронного двигателя (в тех случаях, когда двигатель работает в режиме реверса, для возвращения к нормальному вращению достаточно любой из двух проводов поменять местами на контактах).
Обязательно в конструкции имеется клемма, используемая для заземления.
Рекомендации по обслуживанию оборудования
Чтобы собранный своими руками частотный преобразователь смог успешно выполнять свои функции на протяжении длительного времени, владелец должен выполнять следующие рекомендации:
- Следить за состоянием внутренних элементов, не допуская скопления на них пыли. При необходимости используют небольшой компрессор, поскольку пылесосу может быть не под силу удалить пыль, лежащую плотным слоем.
- Проверять работоспособность узлов и менять их при необходимости. Нормальным для электролитических конденсаторов считается срок службы длительностью 5 лет, для предохранителей – 10 лет. Вентиляторы охлаждения следует менять уже по прошествии 2-3 лет эксплуатации. Внутренние же шлейфы допускается использовать не более 6 лет.
- Необходимо следить за температурой внутренних механизмов, а также напряжением на шине постоянного тока. В случае роста температуры возникает опасность засыхания термопроводящей пасты, что может закончиться выходом из строя конденсаторов. Необходимо взять за правило наносить не реже как минимум каждые три года новый слой пасты на силовые компоненты привода.
- Необходимо в точности соблюдать условия эксплуатации. Оптимальным считается температурный режим окружающей среды на уровне до + 40 градусов. Крайне негативное влияние на работу элементов оказывают повышенная влажность и запыленность воздуха.
Заключение
Частотный преобразователь является необходимым оборудованием, повышающим эффективность работы асинхронного двигателя. При необходимости его можно изготовить своими силами. Для этого достаточно подготовить необходимые материалы и в точности следовать схеме сборки. При этом следует уделить особое внимание обслуживанию частотного преобразователя, так как при отсутствии должного внимания к его состоянию это оборудование может довольно скоро выйти из строя, что негативным образом скажется и на работе электродвигателя.